近日,我校海洋与空间信息学院无人机同轴多传感器系统课题组与英国斯特拉斯克莱德大学、北京航空航天大学、西安交通大学等高校合作,在智能无人检测系统研究方面取得最新进展,相关研究成果Autonomous detection of damage to multiple steel surfaces from 360° panoramas using deep neural networks (基于深度神经网络的多种钢表面损伤360度全景自动检测)发表在国际工程技术领域一区Top期刊Computer-Aided Civil and Infrastructure Engineering(影响因子11.775)上。论文第一作者及通讯作者为我校青年教师玛丽居里学者罗偲,中国石油大学(华东)为第一署名单位。该成果得到国家自然科学基金联合基金重点支持项目、国家自然科学基金面上项目、国家自然科学基金青年科学基金项目、欧盟地平线计划(Horizon 2020)及中国石油大学(华东)自主创新基金项目联合支持。
由于长时间暴露在严苛的工作环境下,复杂立体结构的基础设施表面容易发生侵蚀,如何准确、快速且高效的对设施表面进行检测从而提高维修效率是工程技术领域的难题之一。
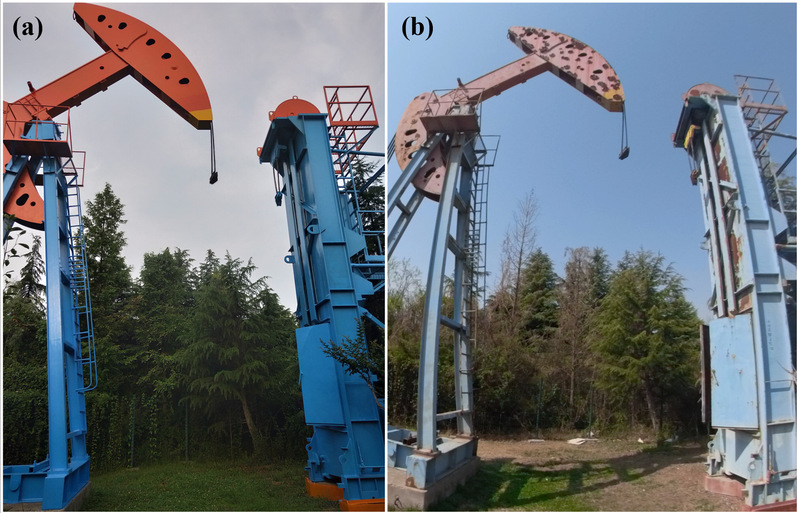
图1 复杂立体结构基础设施表面发生侵蚀
目前国际上常用的技术是利用无人机搭载摄像头,通过人工识别的方法来确定损伤的位置和种类。现有技术的识别准确度极大的依赖人工观察员的识别经验。同时,由于常规摄像头的视场限制,需要人工操作无人机多次穿梭于基础设施中,增加了坠机的风险。无人机课题组通过无人机搭载360度全景摄像机,针对复杂立体结构表面的损失检测,设计了基于深度神经网络的智能算法,综合分类识别准确度由之前的77.53%提高到87.34%,为复杂环境下的智能无人检测系统提供了理论指导与设计思路。

图2 智能无人全景检测系统
经过多年积累与发展,无人机同轴多传感器系统课题组形成了以电子、通信、测绘、机械、控制、材料等多学科协同创新的高水平研究团队,现有教授3人、副教授5人和讲师3人,全日制博士生6人、硕士生90余人。近年来承担国家自然基金、国家重点研发计划及国际间合作重大专项等国家级项目8项,在IEEE PAMI、CACIE、IEEE TIE、RSE、IEEE TGRS等国内外知名期刊发表论文40余篇,在国内外无人生态观测系统与机动组网领域形成了一定的影响力。
相关链接:
https://onlinelibrary.wiley.com/doi/10.1111/mice.12686
(作者:罗偲,审核:贺凯飞,来源:海洋与空间信息学院)